HS-S48L MPU6050陀螺仪模块
1、介绍 点这里回到目录
MPU60506050陀螺仪模块是一款高性能三轴加速度+三轴陀螺仪的六轴传感器模块,采用MPU6050芯片作为核心,MPU-6050是6轴运动处理传感器。它集成了3轴MEMS陀螺仪,3轴MEMS加速度计,以及一个可扩展的数字运动处理器DMP。使用它就是为了得到待测物体(如四轴飞行器、平衡小车)x、y、z轴的倾角(俯仰角Pitch、翻滚角Roll、偏航角Yaw)。我们通过I2C读取MPU6050的六个数据(三轴加速度AD值、三轴角速度AD值)经过姿态融合后就可以得到Pitch、Roll、Yaw角。利用自带的数字运动处理器DMP,通过IIC接口,输出姿态解算后的数据。具有体积小,使用方便等特点。模块自带2个定位孔,方便你将模块固定在其他设备。
2、原理图 点这里回到目录

3、模块参数 点这里回到目录
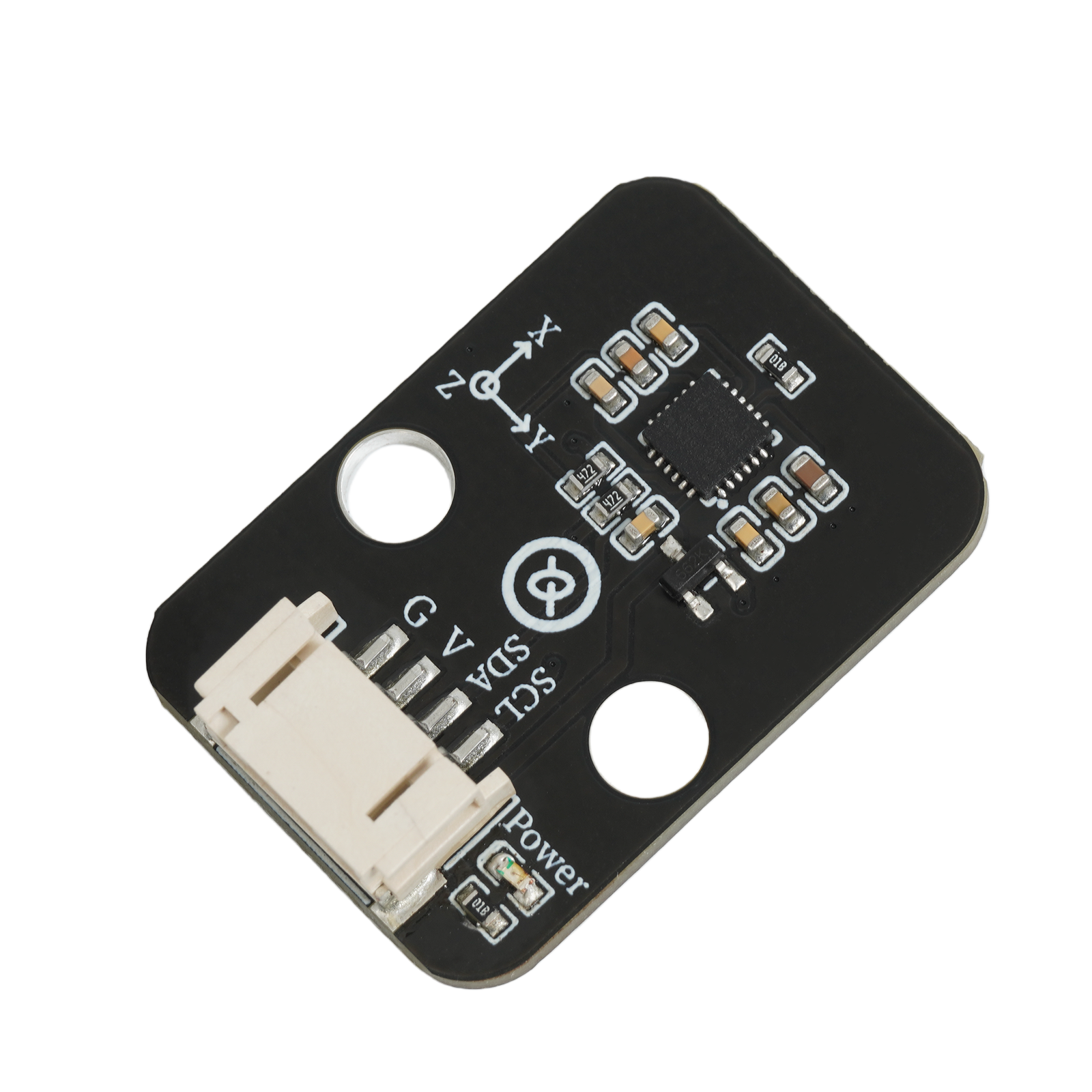
| 引脚名称 | 描述 |
|---|---|
| GND | GND(电源输入负极) |
| VCC | VCC(电源输入正极) |
| SDA | A4引脚 |
| SCL | A5引脚 |
-
供电电压:3.3V / 5V
-
连接方式:PH2.0 端子线
-
安装方式:螺丝固定/乐高搭建
4、电路板尺寸 点这里回到目录

5、Arduino IDE示例程序 点这里回到目录
示例程序:点击下载
#include <MPU6050_tockn.h>
#include <Wire.h>
MPU6050 mpu6050(Wire);
void setup(){
Serial.begin(9600);
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
}
void loop(){
//读取MPU6050数据\n连接方式:MPU6050连接主控板的IIC接口
mpu6050.update();
Serial.print("\nX轴加速度:");
Serial.print(mpu6050.getAccX());
Serial.print("\tY轴加速度:");
Serial.print(mpu6050.getAccY());
Serial.print("\tZ轴加速度:");
Serial.println(mpu6050.getAccZ());
Serial.print("X轴角度:");
Serial.print(mpu6050.getAngleX());
Serial.print("\tY轴角度:");
Serial.print(mpu6050.getAngleY());
Serial.print("\tZ轴角度:");
Serial.println(mpu6050.getAngleZ());
Serial.print("温度:");
Serial.println(mpu6050.getTemp());
Serial.print("###############################################");
delay(1000);
}
6、米思齐 Mixly 示例程序(图形化语言) 点这里回到目录
示例程序:点击下载

7、测试环境搭建 点这里回到目录
准备配件:
- CY9599 UNO-MOC-Pro或CY9599 UNO R3 开发板 *1
- CY9599 UNO EXP1 扩展板 *1
- USB type-c 数据线 *1
- MPU6050陀螺仪模块*1
- PH2.0 4P端子线 *1
电路接线图:

8、添加 Arduino库文件 点这里回到目录
首先找到Arduino库文件夹:

把库文件复制到Arduino IDE软件目录下的libraries文件夹中即可:

库文件:点击下载
9、视频教程 点这里回到目录
视频教程:点击查看
10、测试结论 点这里回到目录

器件连接好线之后,将上述程序上传到开发板之后,即可看到MPU6050陀螺仪模块数据测试